本帖最后由 L0op8ack 于 2014-5-5 15:06 编辑
http://www.f15sim.com/?page_id=16
The F-15 Flight Control System By Pete Garrison, Eagle Driver #2 The philosophy of the Eagle design was primarily, "Let's get the performance, then we'll tame it." The "taming" has been an exercise in flight control wizardry which burned a lot of midnight oil, but has produced for your pleasure a fighter with explosive performance that handles like a dream. However, under all that finery dwells a rather caustic personality which is cloaked in the shroud of acronyms such as CSBPC (Control Stick Boost and Pitch Compensator), PRCA (Pitch and Roll Control Assembly), and PTC (Pitch Trim Compensator). I'm going to assume that you've had some basic exposure to the F-15 flight control system and know that it uses conventional hydro-mechanical ailerons and differential stabilator for roll control, collective stabilator for pitch control, and a rudder on each vertical for yaw control. In addition, there is a dual-channel, high-authority, three-axis CAS (Control Augmentation System) superimposed on the hydro-mechanical system. The CAS is utilized to shape aircraft response to pilot inputs, as well as provide three-axis damping and autopilot functions. The CAS can also provide aircraft control in the event of a mechanical system failure. With this in mind, I'd like to break the control system into two elements - the basic hydro-mechanical system and the electronic system (CAS) - then further subdivide each and perhaps give you some insight as to why things are as they are. Basic Hydro-Mechanical Control System Pitch Ratio - This device adjusts the amount of collective (pitch) stabilator deflection available for a given longitudinal stick motion. The ratio is scheduled to produce essentially the same stick travel per "g" throughout the flight envelope. Since the longitudinal feel system is just a simple spring cartridge, this then relates to a constant stick force per "g" (Fs/g) (about 4.25 lb/g). It is scheduled by Mach number and altitude and does a rather good job; however, it won't quite cover the full range of aircraft and stabilator power and there is some scatter of the Fs/g, i.e., some mild increase in sensitivity during low altitude/high speed flight, and some decrease in sensitivity at low speeds. Pitch Trim Compensator (PTC) - Obviously, the airplane can be disturbed in pitch in several ways - speed brakes, transonic trim changes, flap extension, etc., so the PTC system was devised to relieve the pilot of the task of compensating for these things with large longitudinal stick motions. In reality, it is an automatic series trim which senses that the pilot is beginning to compensate for a change in trim. Remember, the Eagle flys at essentially a constant stick position for a given g. If that stick position changes and the aircraft is not responding with the correct g schedule at 5.25lb/g, the PTC will move the stabilator in the direction to maintain the g schedule. This is also true at 1 g and at any disturbance from 1 g which the pilot begins to compensate for will automatically be trimmed to maintain 1 g. Since it is a "series" trim, the stick won't move perceptibly, the but the stabilator will. It will continue to move to the limits of the PTC authority so long as the error signal between the stick position and the aircraft g schedule exists. Another fall-out of this system then becomes obvious - as you change speeds, there is no requirement to trim the aircraft in pitch - viola! "neutral speed stability" (at least with the gear up). It's going to be new to some of you, but I predict you're going to like it. No more frantically trying to keep up with trim during an A/B acceleration. On the subject of trim, the stick grip trim feels absolutely conventional. It simply puts a bias in the system, and it is not trimmed out by the PTC. If you're one of those strong armed nuts who likes to fly around with a bag full of force on the stick 'ala Thunderbirds, be our guest. It works fine! Roll Ratio Changer - The roll ratio changer is simply an effort to accomplish in roll what we do in pitch, i.e., maintain the initial roll response of the aircraft somewhat constant. We use both ailerons and differential stabilator for hydro-mechanical roll control, and would generate some unacceptably high rolling accelerations, roll rates, and structural loads at high speed if we didn't back off the amount of roll control surface available with a given lateral stick command. Even with the use of the roll ratio, the max roll rate of the Eagle scatters quite a bit; however, the time to bank to 90 degrees stays together pretty well. Aileron/Rudder Interconnect (ARI) - Most pilots have excellent instinctive response to pitch and roll, but stupid feet. When the lateral acceleration has you pasted on the canopy rail, everyone has a pet "memory cue" to rely on, like "step on the hard rudder," "squeeze the ball in the middle," etc. That may have been okay for "flying the hump," but it just won't do anymore in the fighter business. We spent an awful lot of time trying to convince Hun and Phantom pilots that nature had intended that any maneuvering at high angles of attack must be done with the feet, but even then it didn't always work. The ARI "beasty" in the F-15 in an attempt to cure the "stupid feet syndrome" and put some logic back into "stick back, nose up" and "stick right, roll right"! The business of stick right-yaw left has made many a fearless fighter pilot pale. During rolling maneuvers, the F-15 has its share of adverse yaw at positive angles of attack and proverse yaw at negative angles of attack (primarily in the subsonic area, so the hydro-mechanical ARI is cut out during supersonic flight). Therefore, we simply utilize the roll ratio changer to wash out the yaw producing differential controls at aft or forward stick positions and produce rudder in the direction of the roll at positive (aft stick) angles of attack and against the roll at negative (forward stick) angles of attack. This is done to keep the adverse yaw from killing the roll rate at positive angles and prevent the proverse yaw from producing extremely high roll rates at negative angle of attack. Remember, the F-15 has strong positive dihedral effect, which produces strong roll in the direction of yaw at all flight conditions. The full ARI is fine for the clean configuration; however, in he landing configuration, it's not so swift, particularly during the landing rollout with the stick held aft and attempting to put down that rising upwind wing. All that would be accomplished would be very little lateral control and a hard rudder into the wind. Take it from me, it's uncomfortable - so - on gear extension, we eliminate the lateral control washout with longitudinal stick position but retain the rudder deflection with lateral stick. On touchdown, we also eliminate the rudder deflection with the lateral stick. In other words, on the runway, we go back to conventional relationship of stick/rudder pedal to control surface. Rudder Authority - The F-15 has three different hydro-mechanical rudder authorities: +/- 15 degrees of pilot input below 1.5 Mach number +/- 5 degrees of pilot input above 1.5 Mach number +/- 30 degrees for ARI input with the stick held full aft and full lateral inputs made
The reason - high positive dihedral effect accompanied by very high rudder power generates too much roll due to yaw to allow the pilot the full 30 degrees of rudder on the pedals. Steady-state, full-rudder sideslips would be impossible to control even though the rudder will not fully deflect as speed increases due to aerodynamic loads. However, the full 30 degrees is required to handle the adverse yaw situation at some extremely high angle of attack flight conditions. Control Augmentation System (CAS) The F-15 CAS utilizes series authority in all three axes. This simply means that the primary surface actuators contain an electronically controlled input to the actuator which can move the surface without pilot control stick motion. Although the CAS cannon move the actuator full stroke, the authority available can produce very large control surface motion. Consequently, a hard-over could cause out-of-control or structural failure. Since the pilot's capability to respond to this high authority is limited by his reaction time, the system contains an "automatic paddle switch" in the form of dual channels. Two completely redundant channels are constantly compared to each other, and in the event of a failure of one channel, the entire axis shuts down. Pitch Channel - The pitch CAS channel detects a pilot pitch force command on the stick and converts this into an electrical command at approximately 3.75 lb/g. As the aircraft begins to respond, g and pitch rate "feed back" against the command signal so as to maintain a given Fs/g and damping characteristic. The hydro-mechanical system is continuing to function as previously described even though the series actuator is fine-tuning the pitch handling qualities through the CAS. The prime interface between the pitch CAS and pitch hydro-mechanical is through the CAS interconnect servo which drives the PTC in the direction to keep the CAS series servo centered in its +/- 10 degree stabilator pitch authority. The pitch CAS also incorporates a washout signal with angle of attack, so that the pitch series servo won't try to hold the stabilator up to the limit of its series authority during stall approaches. By washing out the pitch CAS at high angles of attack, the stick forces and aircraft motion look the same pitch CAS on or off - i.e. - the nose gets heavy at the same speeds because the CAS cannot delivery the extra 10 degrees of CAS stabilator authority as would be dictated if the washout was not used. Roll Channel - The roll CAS channel attempts to fine-tune the roll performance. Pilot lateral stick motion results in the hydro-mechanical differential stabilator and aileron deflecting and at the same time, the lateral force on the stick results in an electrical roll rate command signal. The roll CAS attempts to satisfy the command through the series CAS authority of the differential stabilator (no CAS series authority on ailerons). In addition, roll damping is provided through the same series authority. The max CAS roll rate command is reduced above 1.5 Mach number to reduce the maximum roll rates at high supersonic speeds. Yaw Channel - The yaw CAS series servo authority provides yaw damping, which needs no further explanation, plus a couple of other items which do - i.e. - CAS ARI and turn coordination. The CAS ARI does essentially the same job as the hydro-mechanical ARI except that it is scheduled by roll rate as a function of angle of attack. It can operate subsonically or supersonically if required, to keep the aircraft coordinated during rolling maneuvers. It attempts to keep the lateral acceleration as close to zero as possible. Since it has a series authority of +/- 15 degrees of rudder, it can add this 15 degrees to the 15 degrees available to the pilot through the mechanical linkage when on the ground (no feed back). In the air, the feed-back loops will prevent the pilot from getting more than the 15 degrees hydro-mechanical deflection unless it's required to maintain zero side slip due to some aerodynamic asymmetry such as split flap, asymmetric external stores, etc. I hope this has cast some light on the why's of the Eagle's flight control system. Happily, it comes together quickly after you start to fly, so relax and enjoy it!
|  |小黑屋|手机版|3GO模拟飞行网|3GO Cyber Air Force
( 沪ICP备08002287号|沪ICP备14050587号 )
|小黑屋|手机版|3GO模拟飞行网|3GO Cyber Air Force
( 沪ICP备08002287号|沪ICP备14050587号 )

 发表于 2014-5-5 14:49:00
发表于 2014-5-5 14:49:00
 楼主
楼主
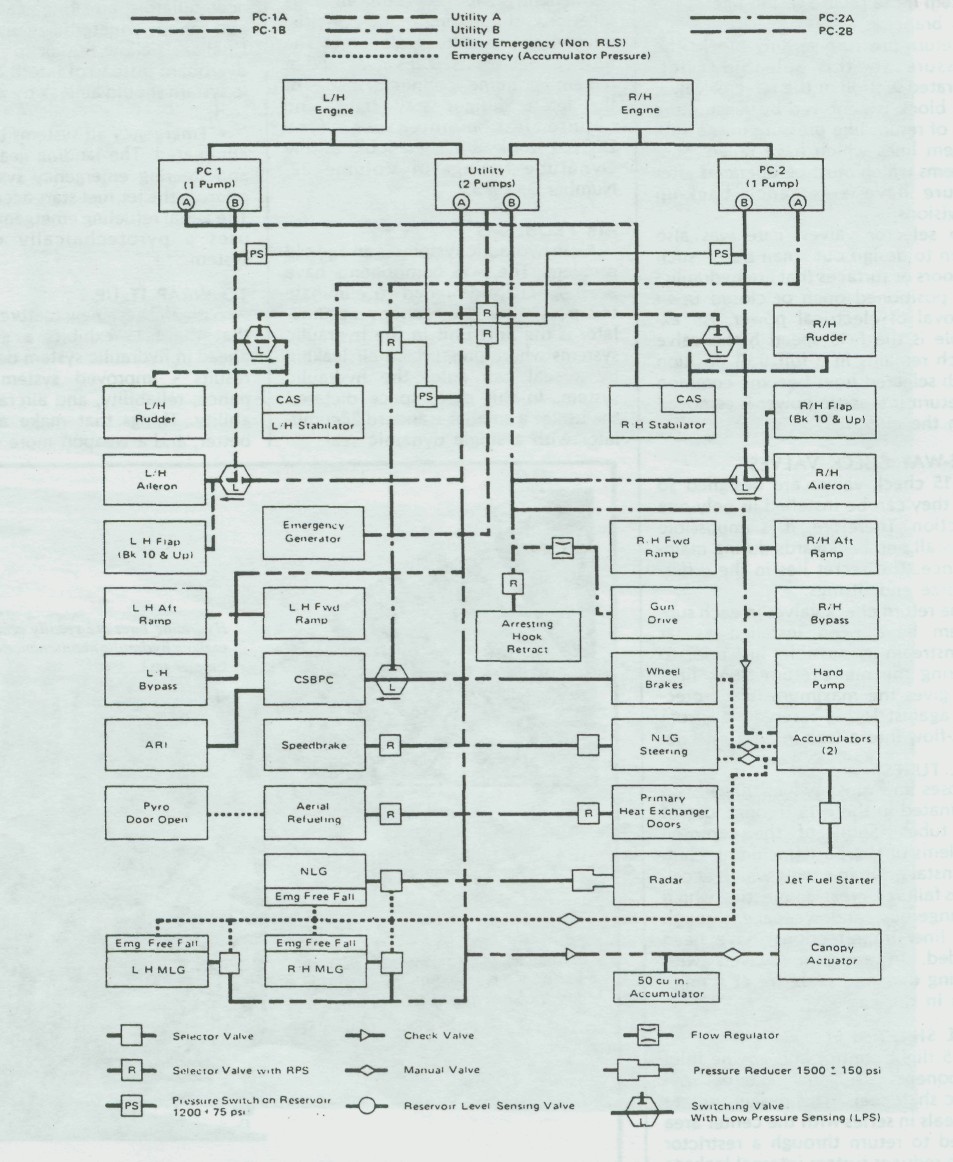 F-15 Hydraulic System Diagram
F-15 Hydraulic System Diagram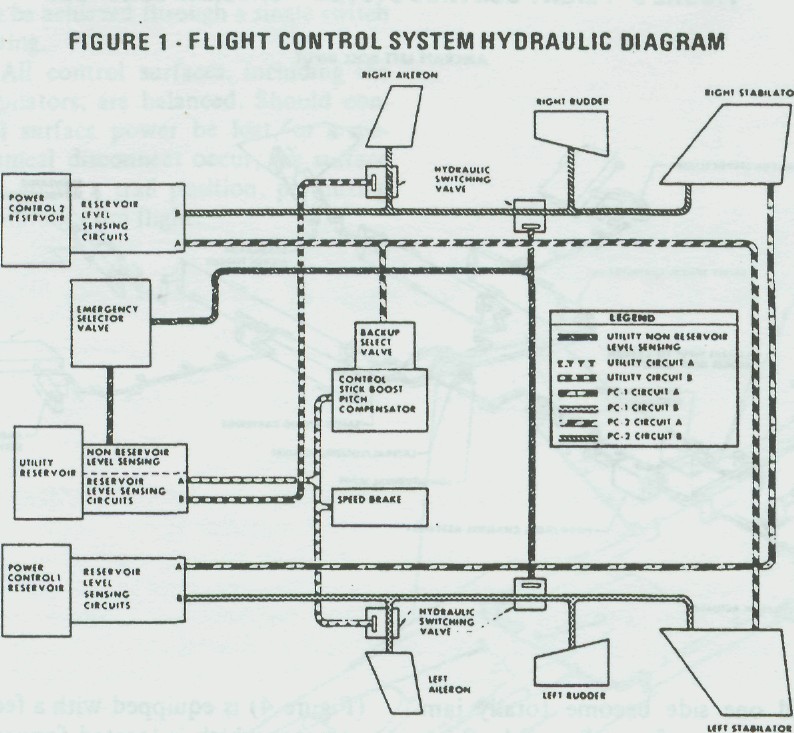
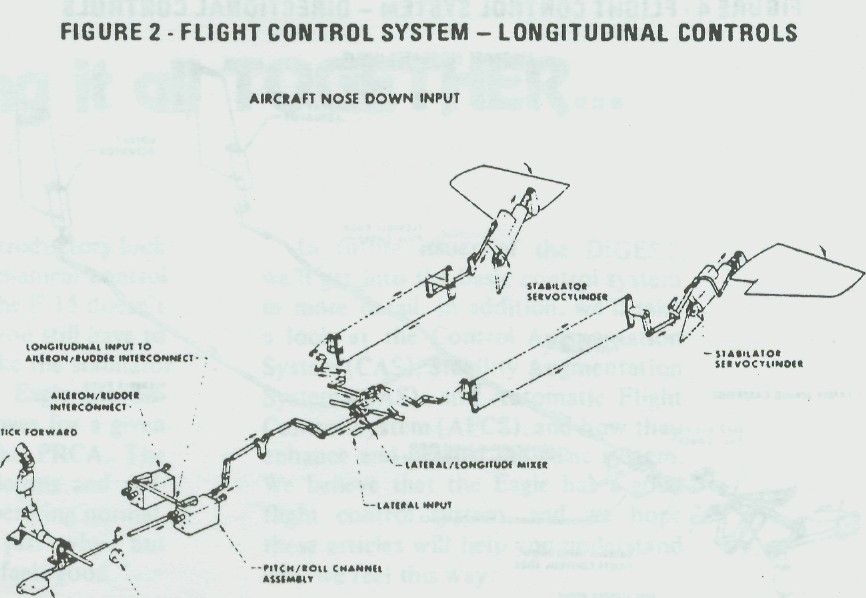
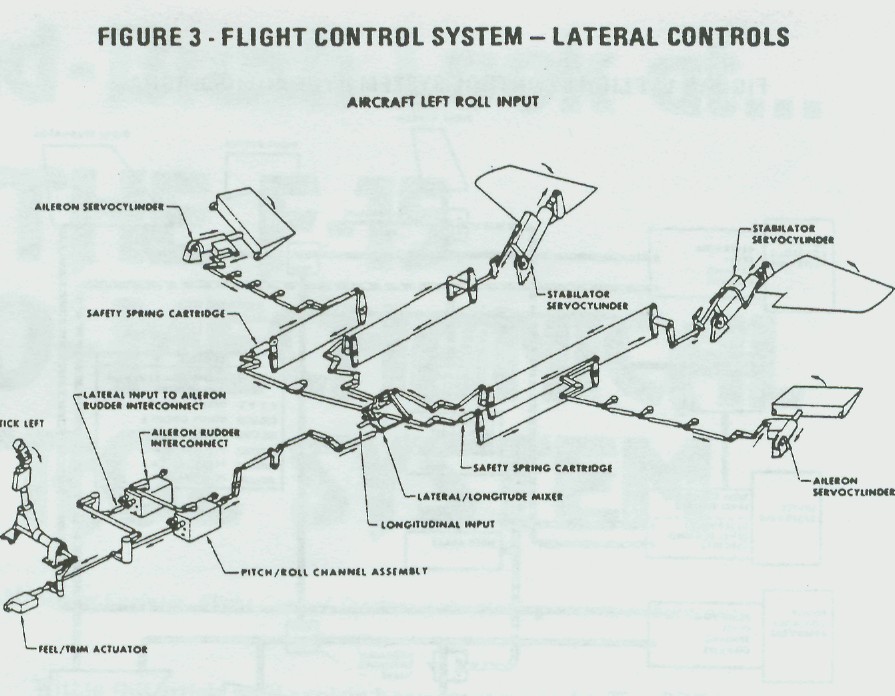 Fig. #3: Flight Control System - Lateral Controls
Fig. #3: Flight Control System - Lateral Controls Fig. #4: Flight Control System - Directional Control
Fig. #4: Flight Control System - Directional Control Fig. #5: Flight Control System Linkage Illustration
Fig. #5: Flight Control System Linkage Illustration Fig. #1: Flight Control System - Directional Controls
Fig. #1: Flight Control System - Directional Controls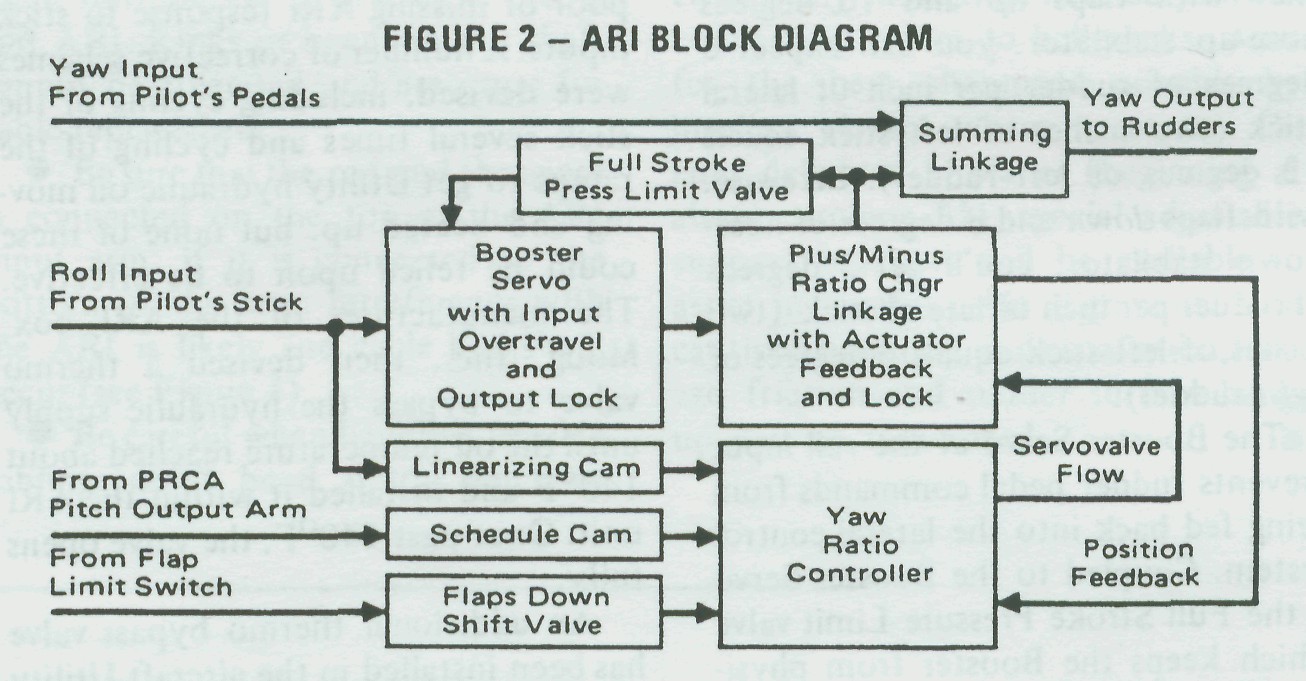
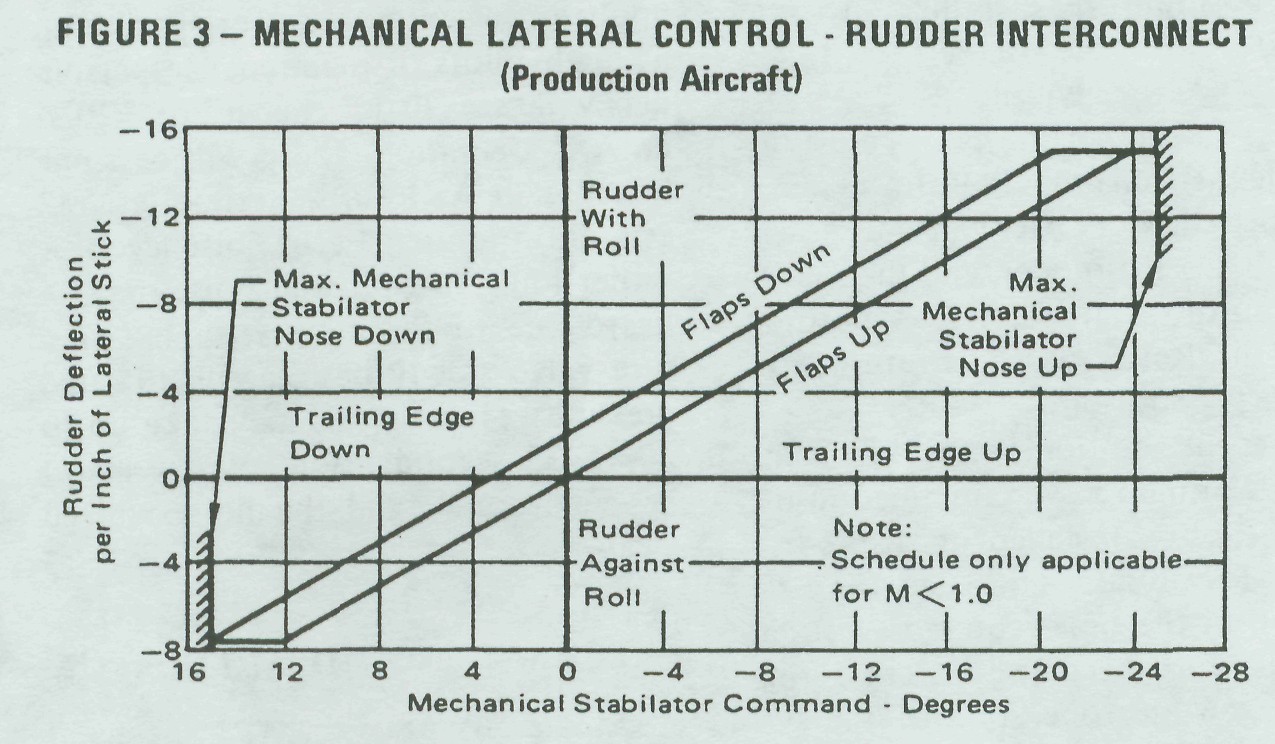 Fig. #3: Mechanical Lateral Control - Rudder Interconnect (Production Aircraft)
Fig. #3: Mechanical Lateral Control - Rudder Interconnect (Production Aircraft)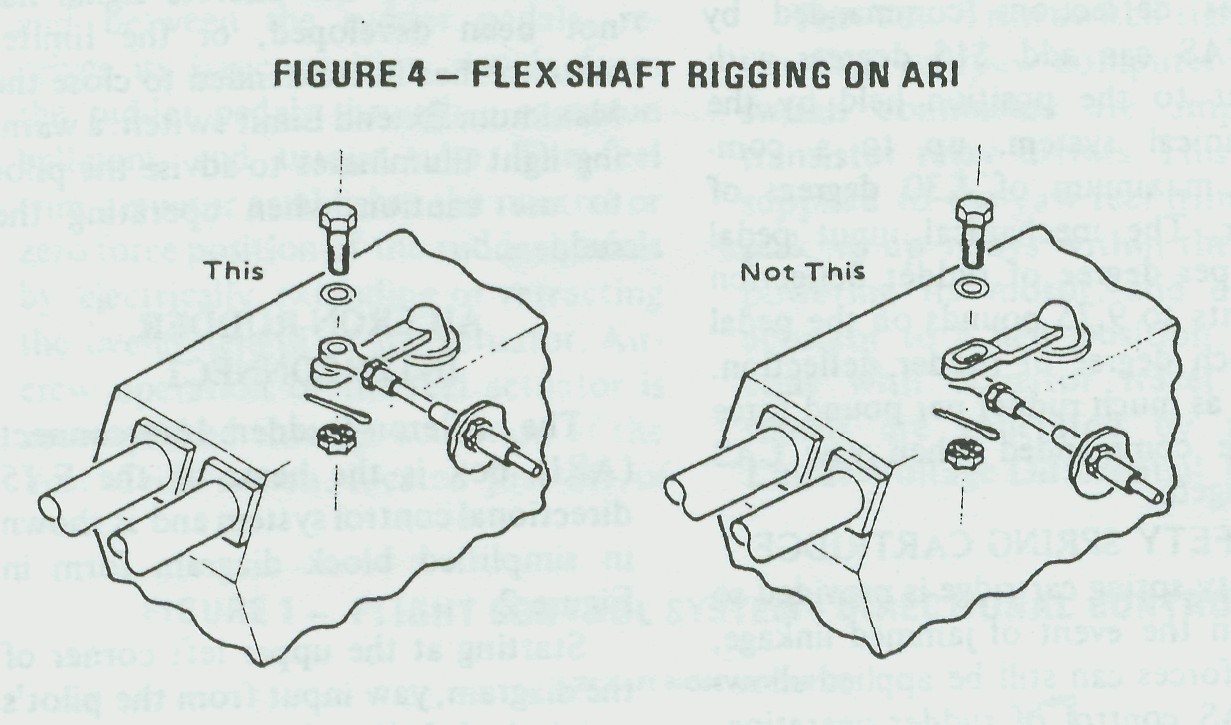 Fig. #4: Flex shaft rigging on ARI
Fig. #4: Flex shaft rigging on ARI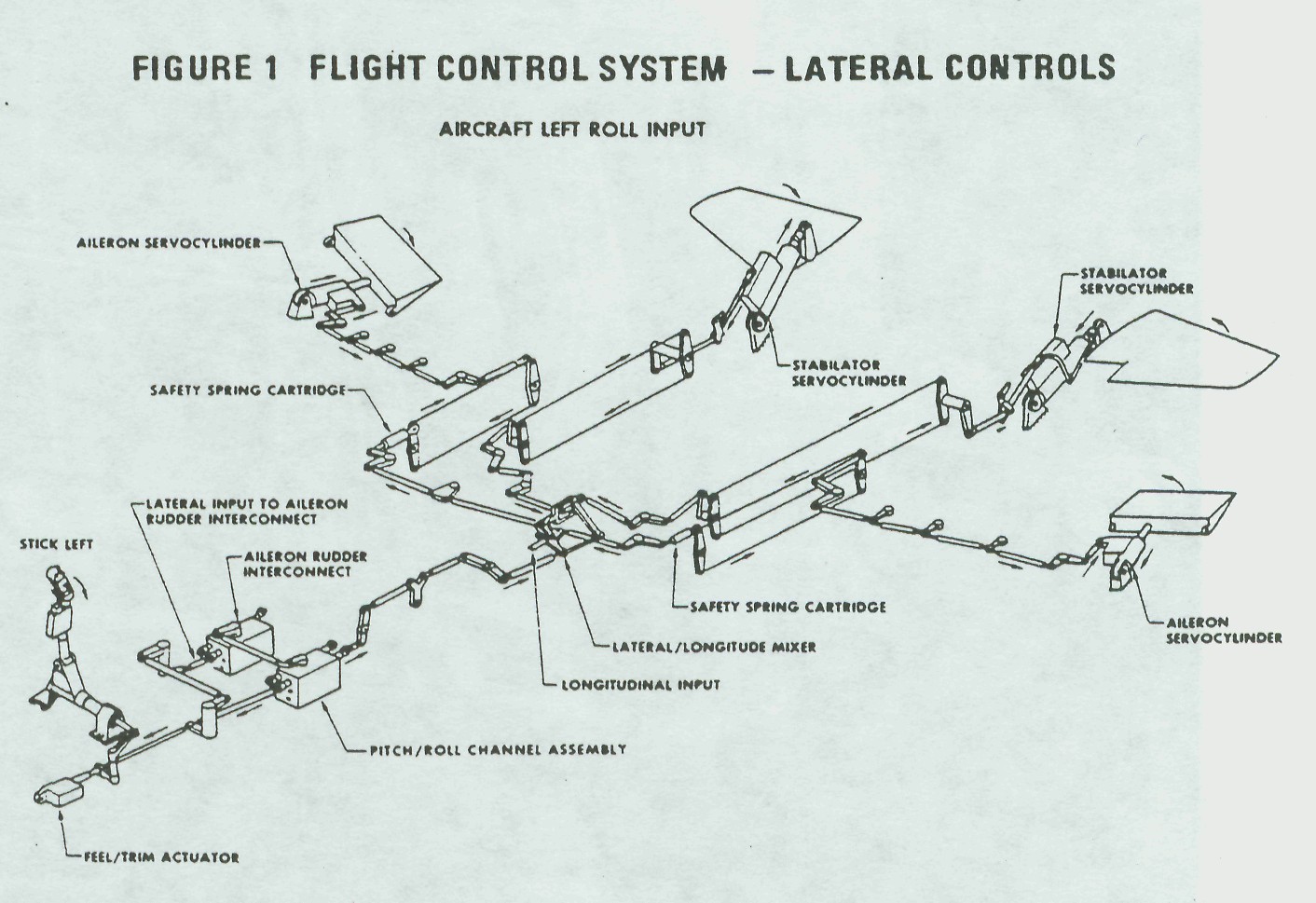 Fig. #1: Flight Control System - Lateral Controls
Fig. #1: Flight Control System - Lateral Controls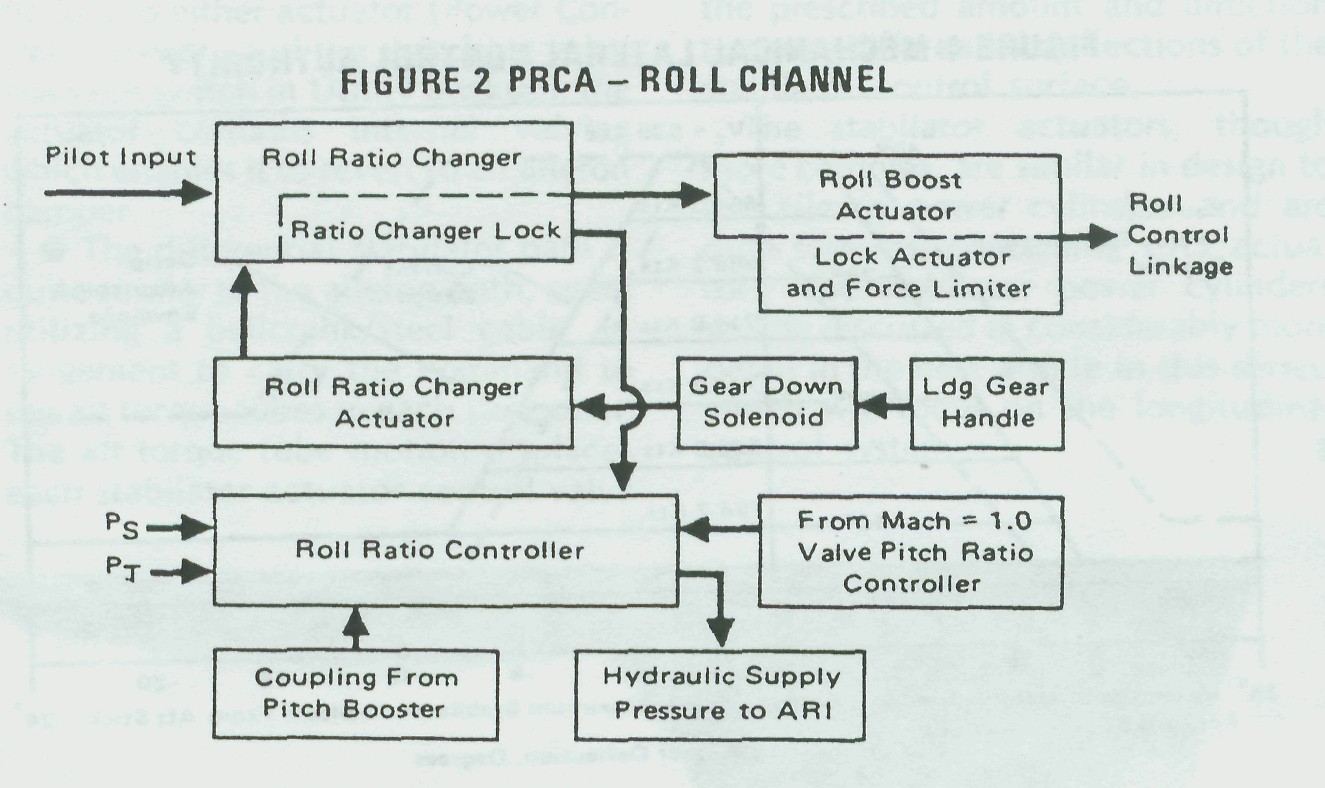 Fig. #2: PRCA - Roll Channel
Fig. #2: PRCA - Roll Channel
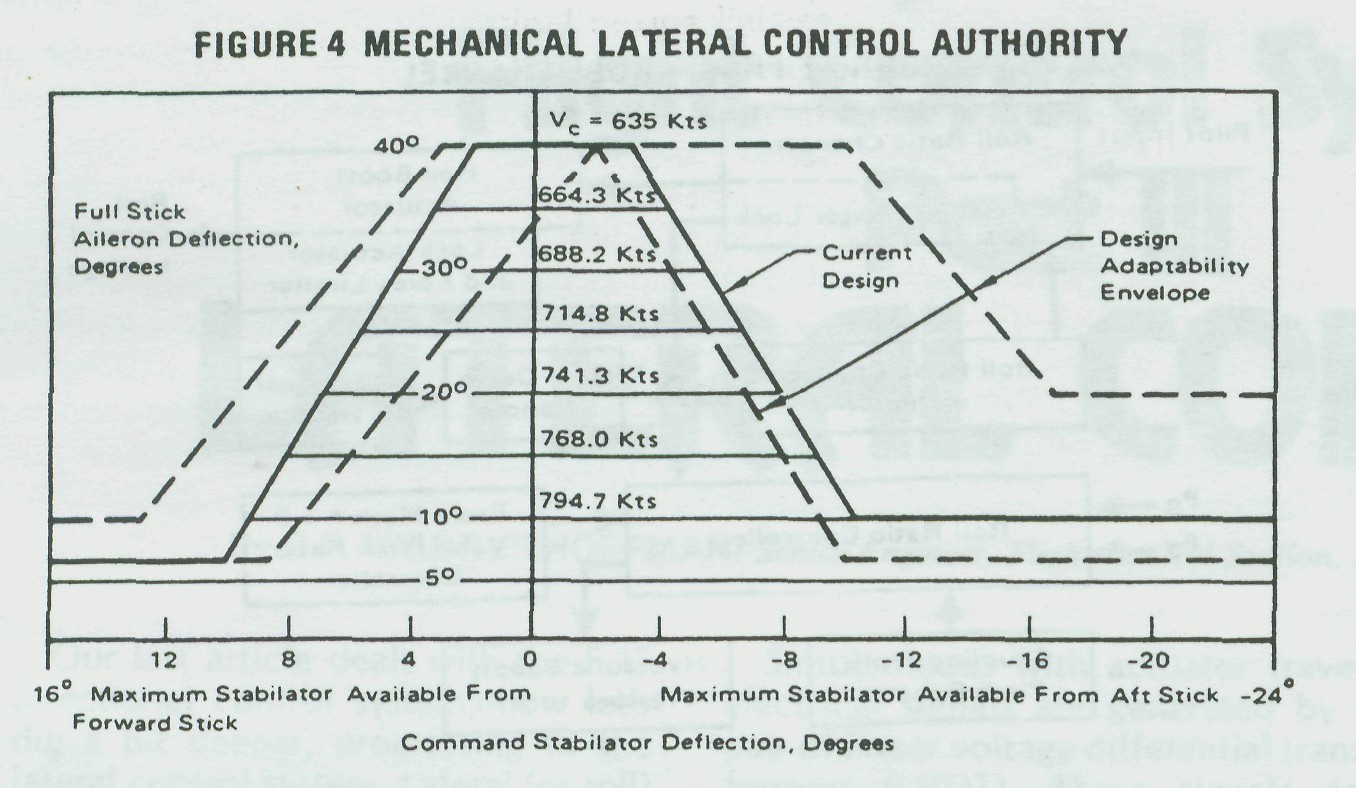 Fig. #4: Mechanical Lateral Control Authority
Fig. #4: Mechanical Lateral Control Authority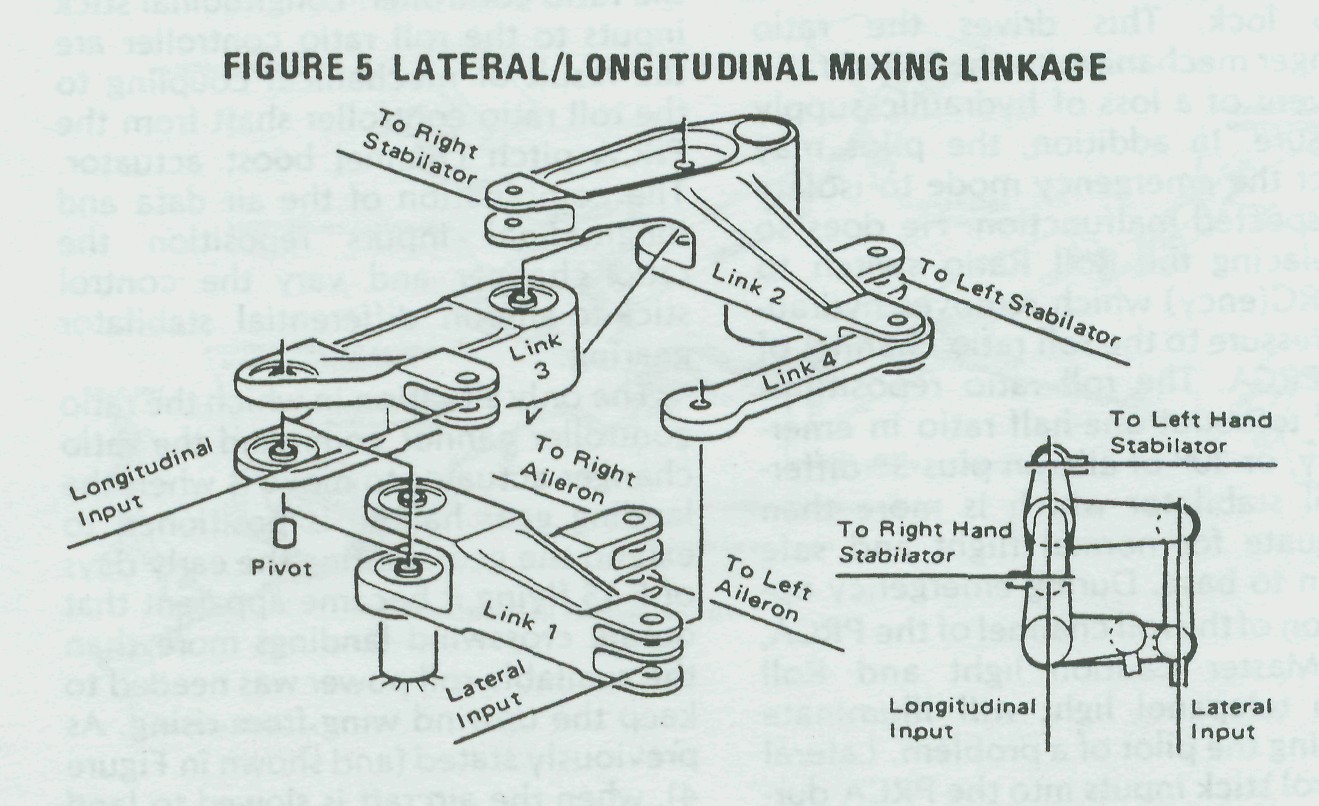
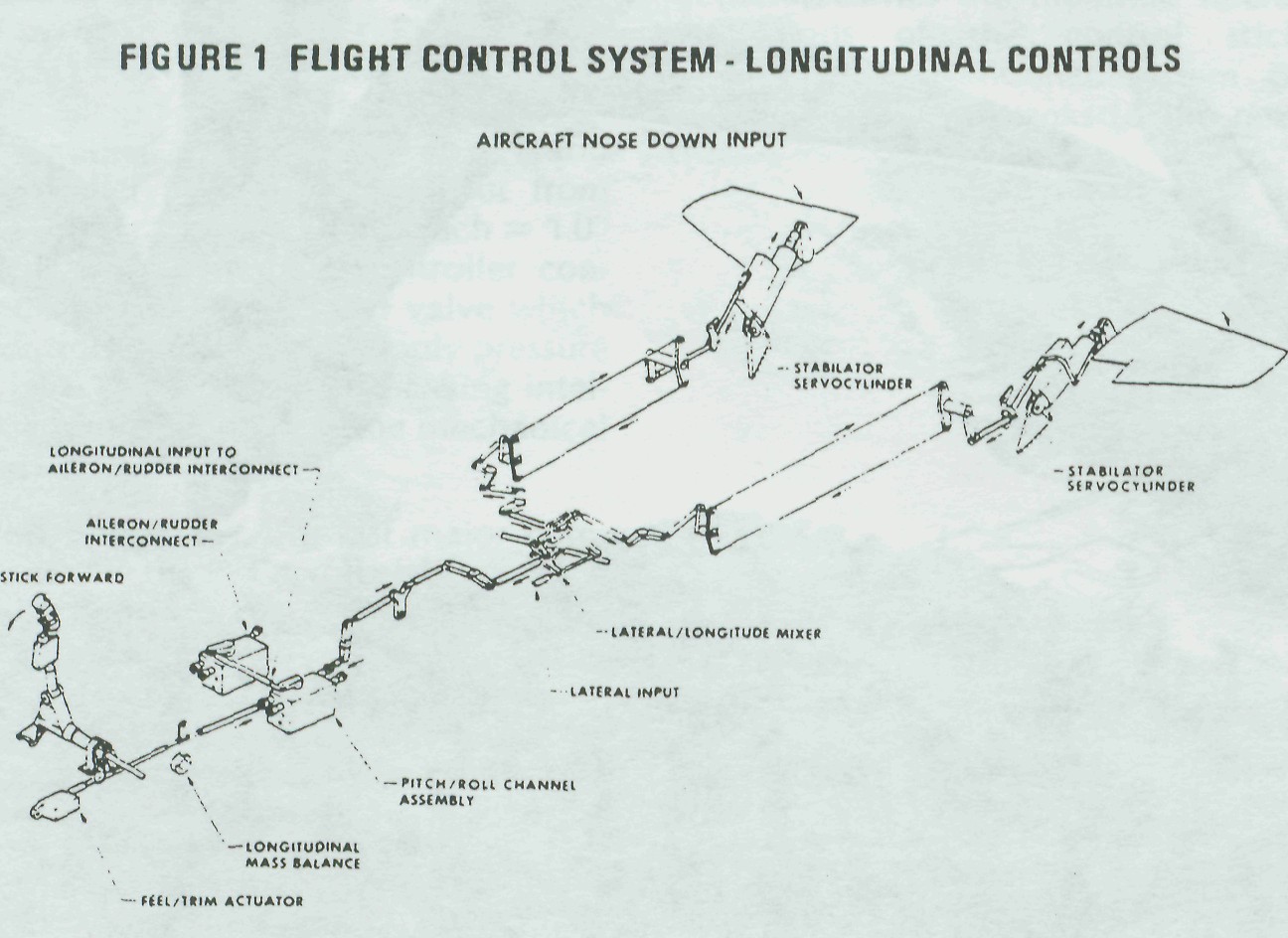 Fig. #1: Flight Control System - Longitudinal Controls
Fig. #1: Flight Control System - Longitudinal Controls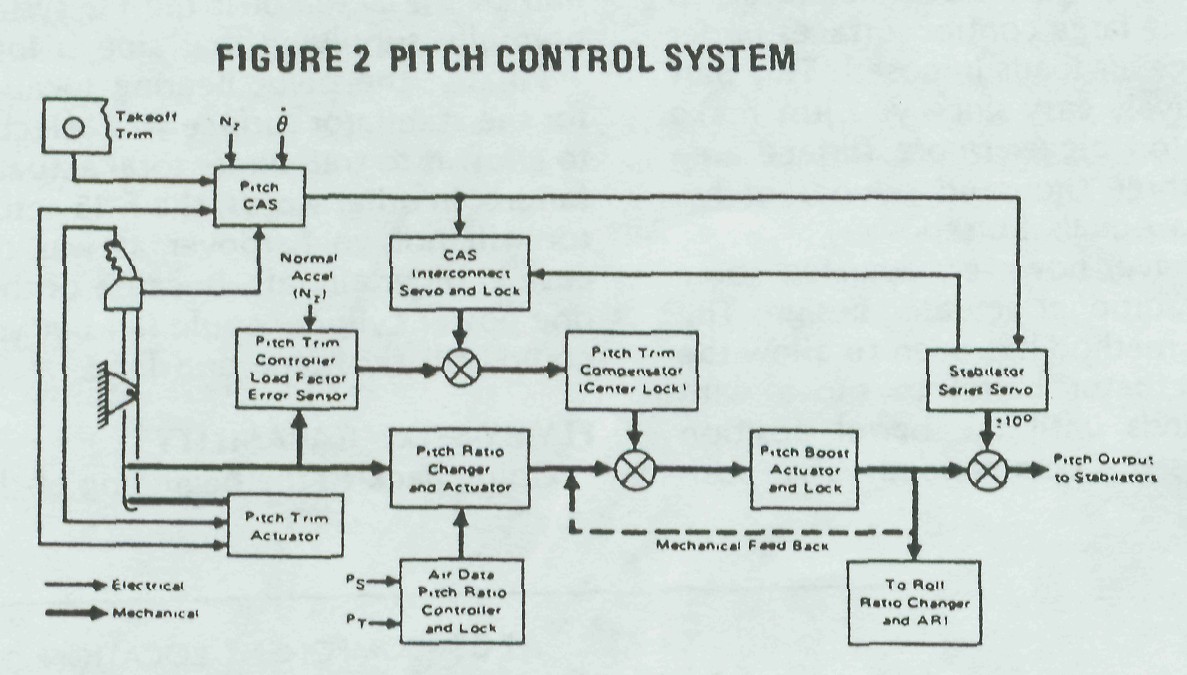 Fig. #2: Pitch Control System
Fig. #2: Pitch Control System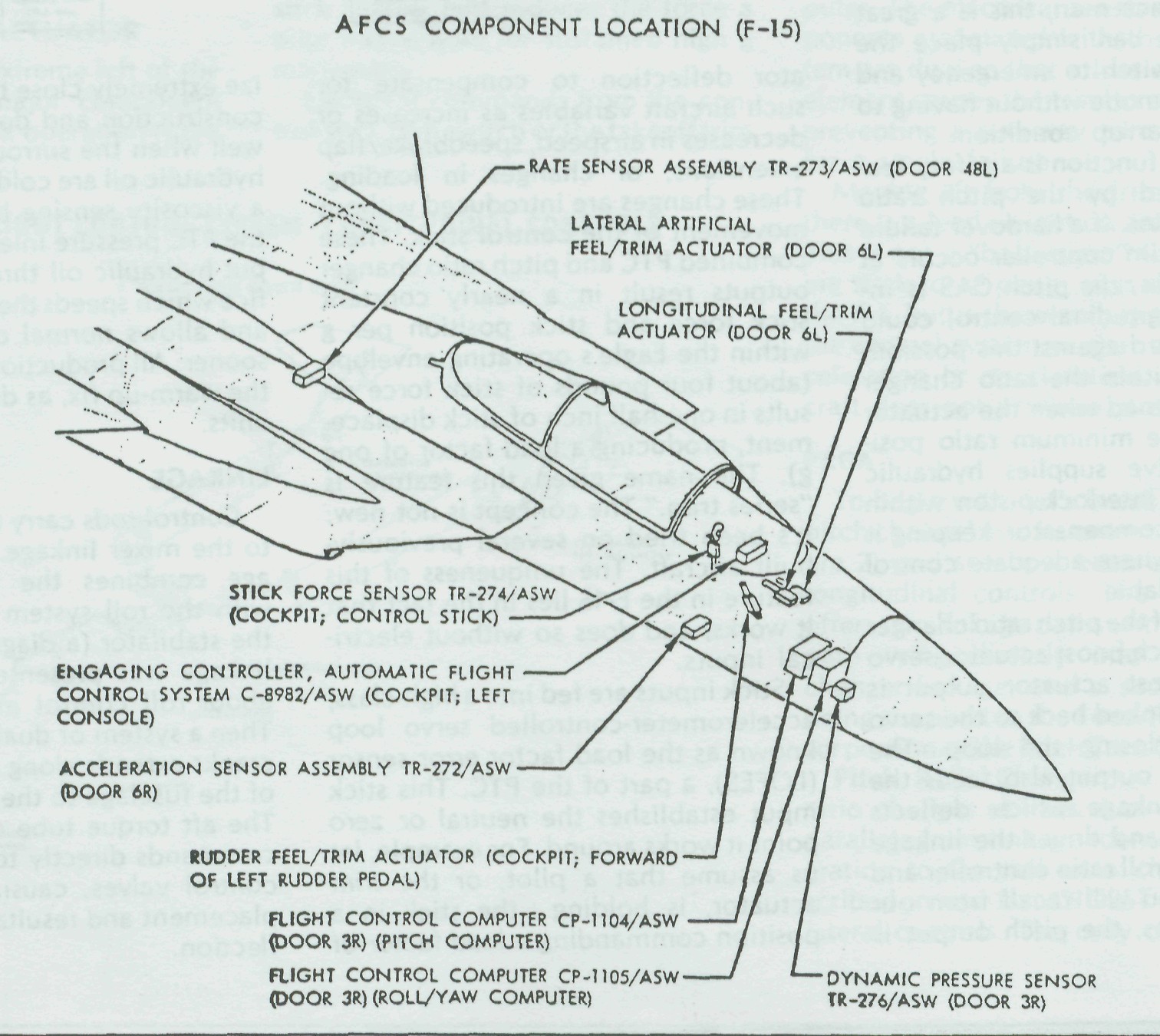 Fig. #3: AFCS Component Location (F-15)
Fig. #3: AFCS Component Location (F-15)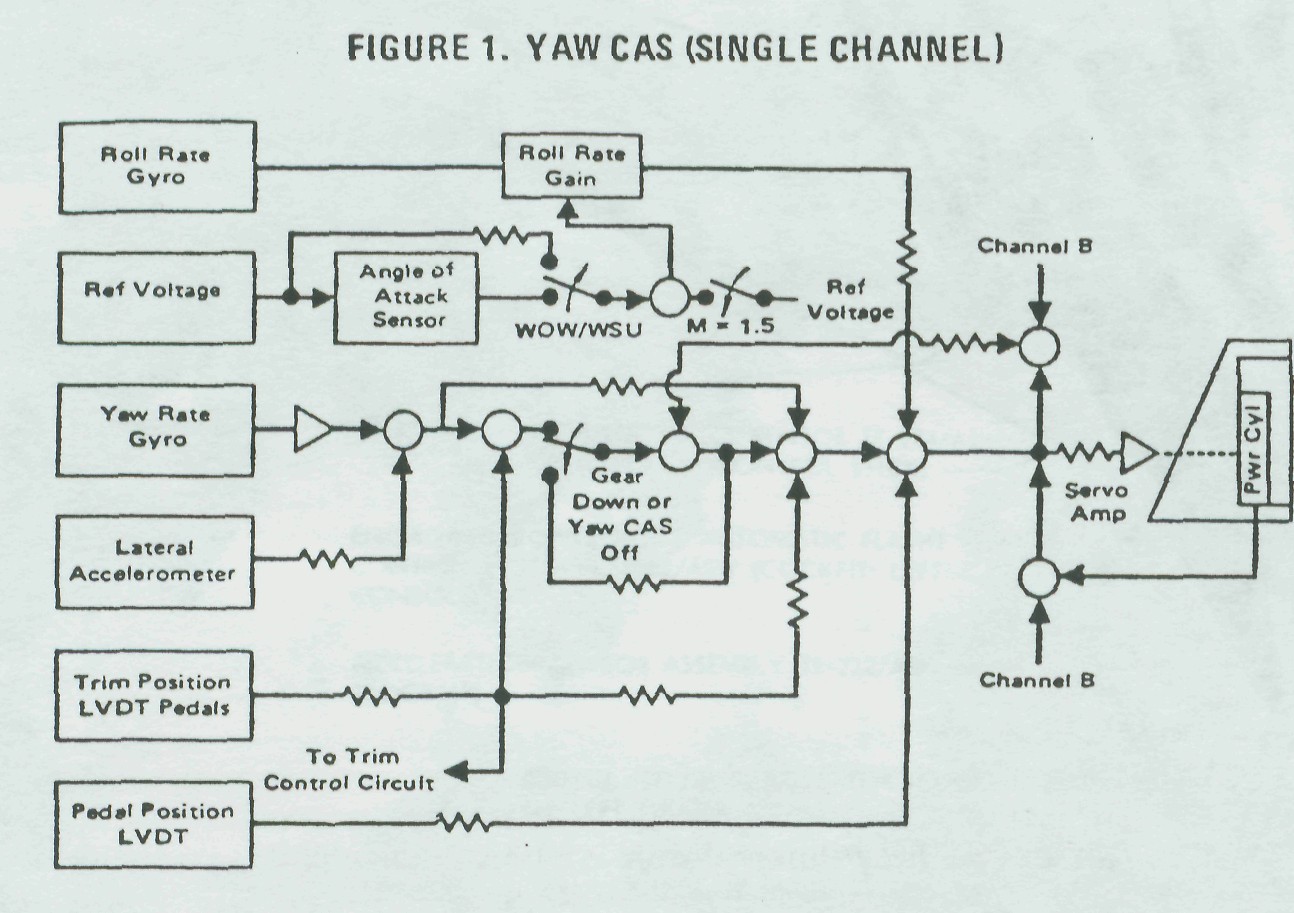 Fig. #1: Yaw CAS (Single Channel)
Fig. #1: Yaw CAS (Single Channel)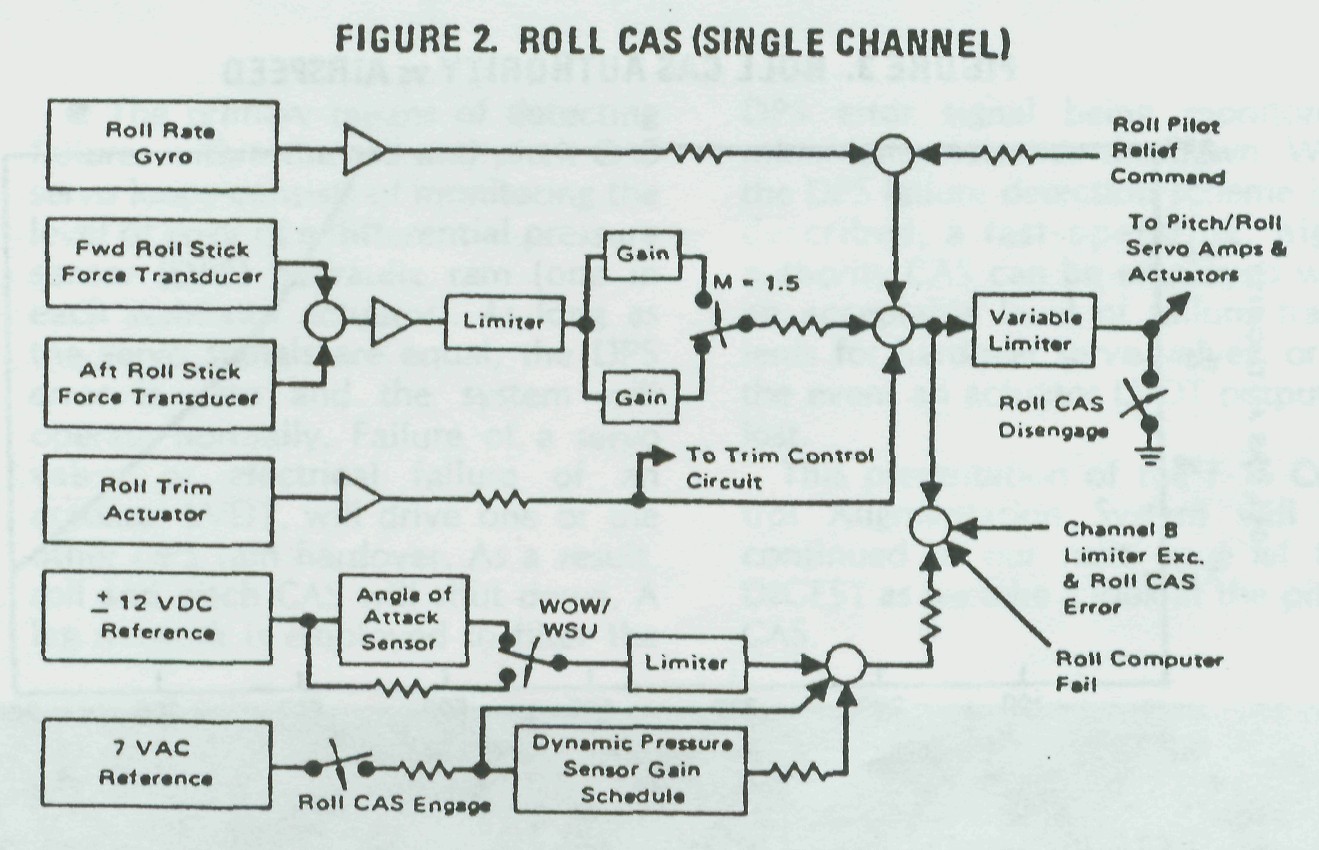 Fig. #2: Roll CAS (Single Channel)
Fig. #2: Roll CAS (Single Channel)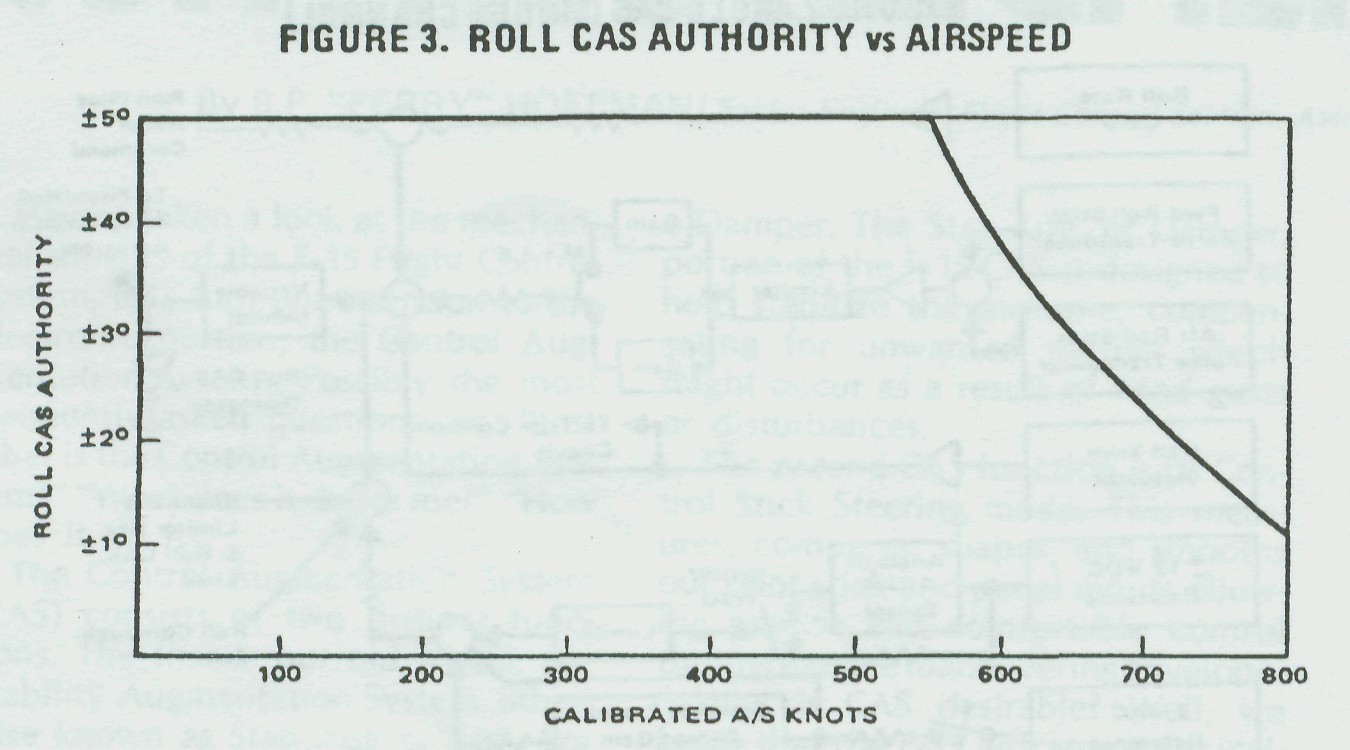 Fig. #3: Roll CAS Authority vs Airspeed
Fig. #3: Roll CAS Authority vs Airspeed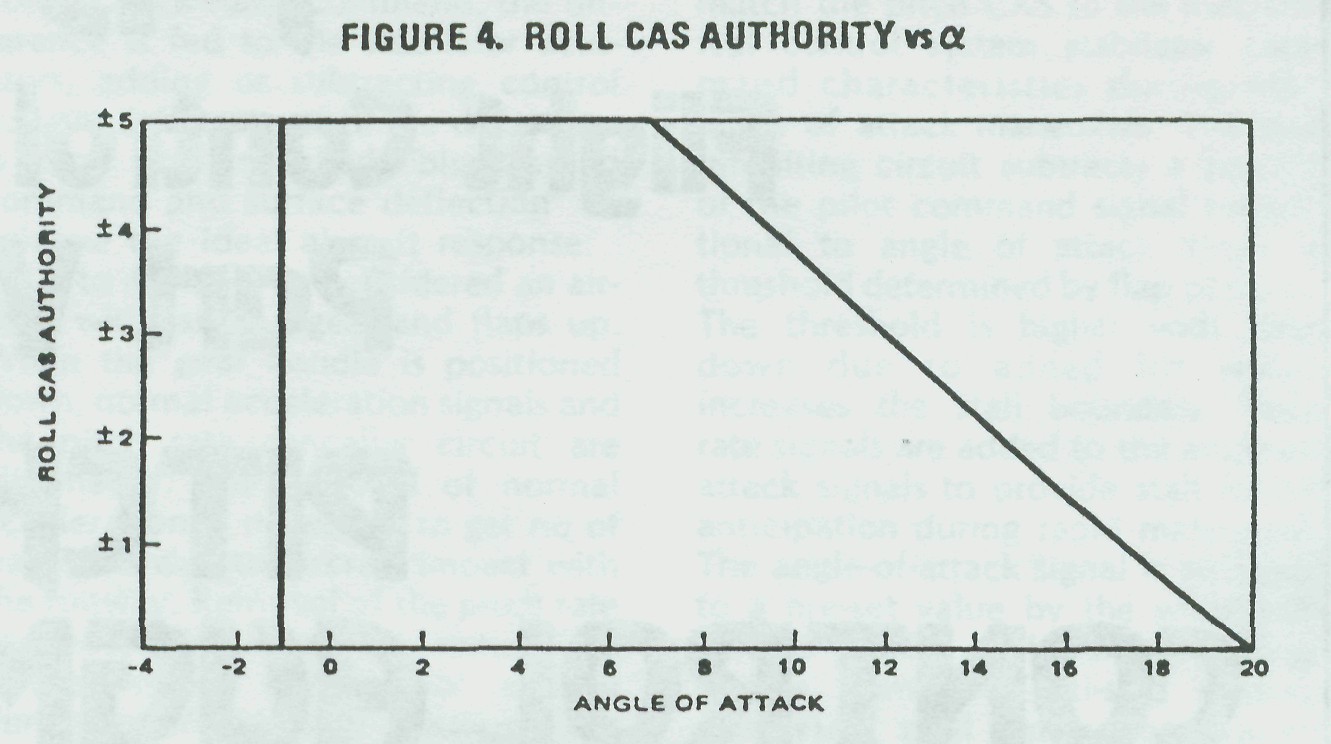 Fig. #3: Roll CAS Authority vs α
Fig. #3: Roll CAS Authority vs α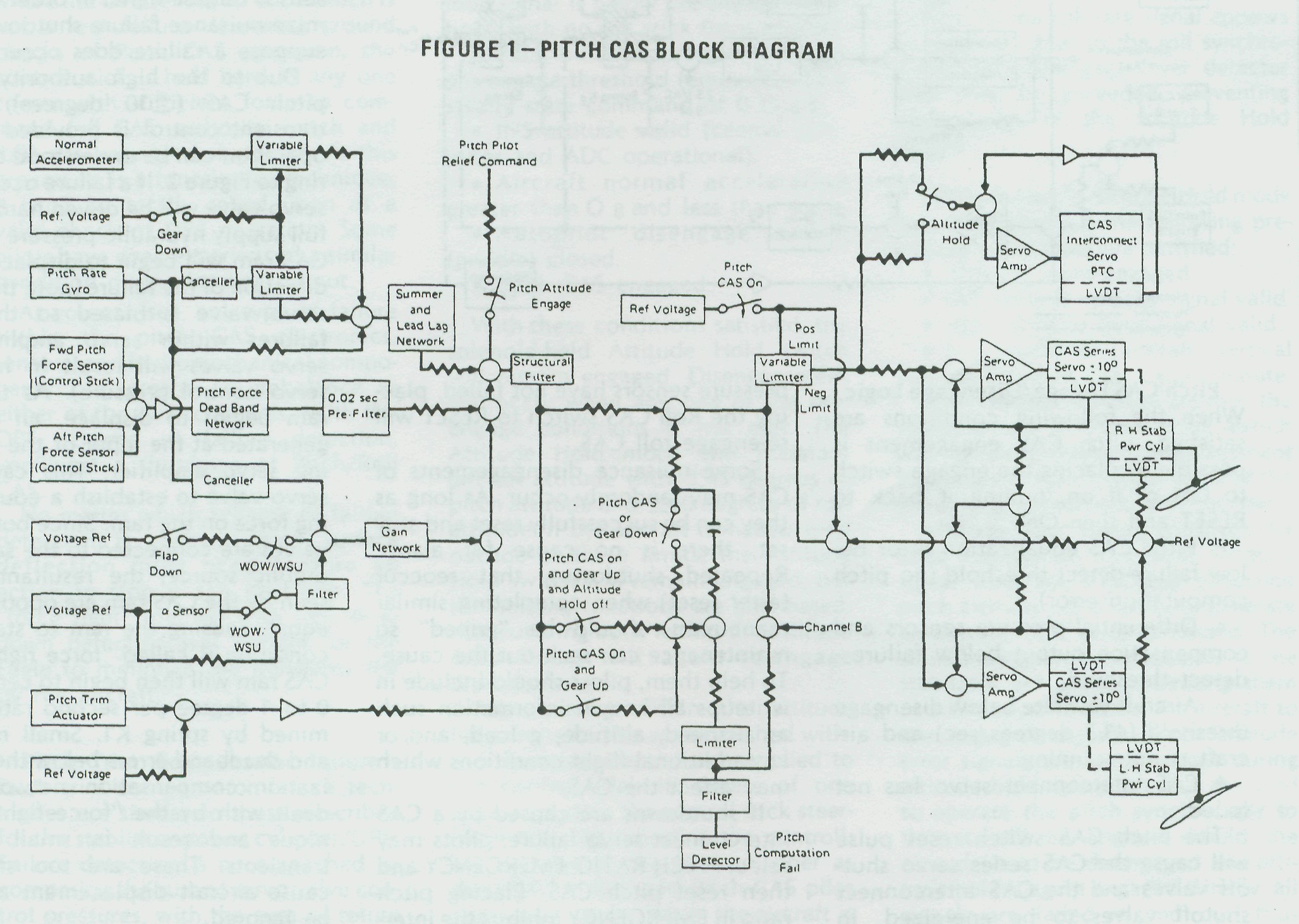 Fig. #1: Pitch CAS Block Diagram
Fig. #1: Pitch CAS Block Diagram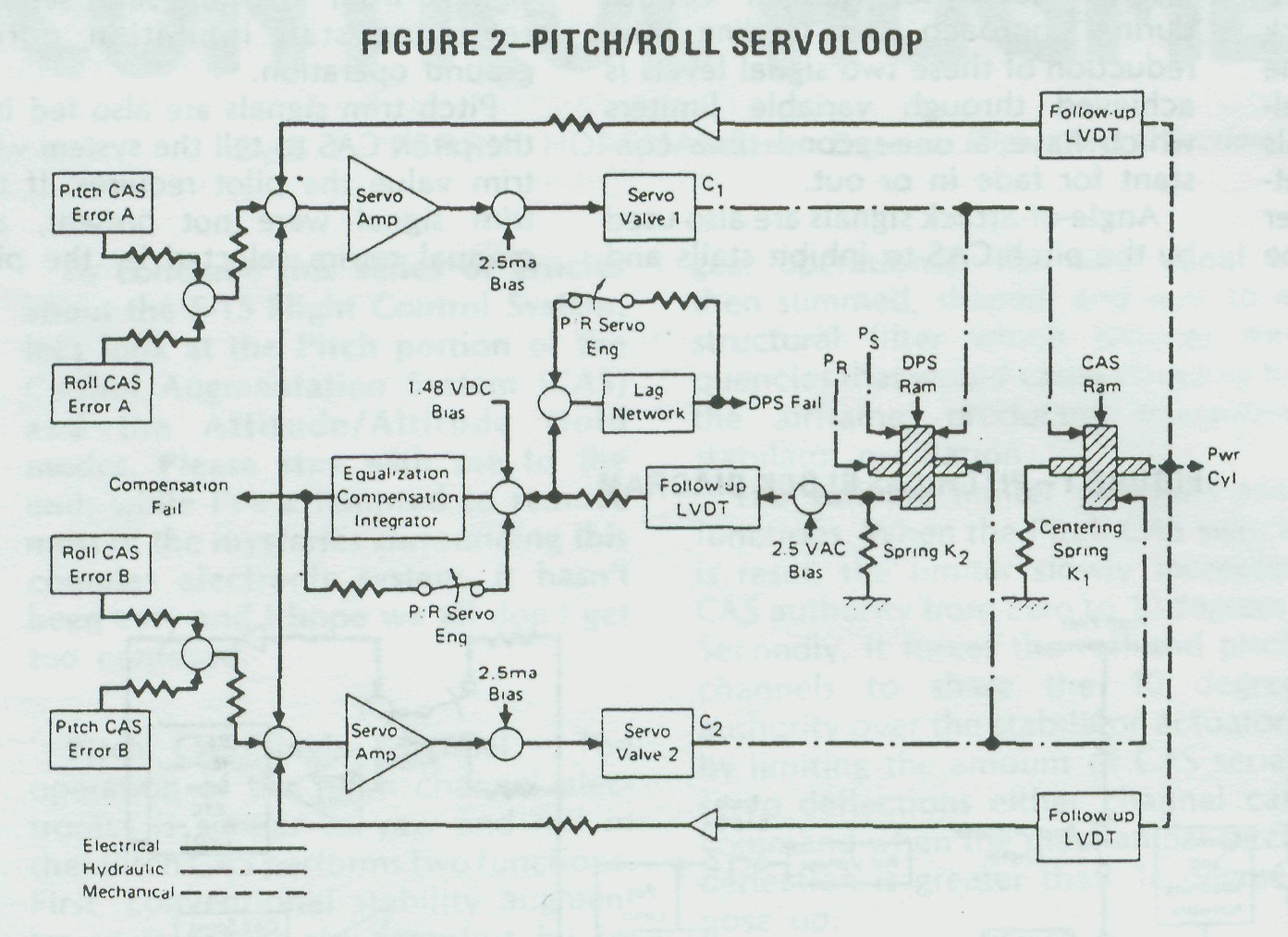 Fig. #2: Pitch/Roll Servoloop
Fig. #2: Pitch/Roll Servoloop 发表于 2016-1-2 20:36:46
发表于 2016-1-2 20:36:46